
Bringing Fiction to Life- Rick and Morty’s Butter Robot
When: November 2019- December 2019
What: Iterative Design, Prototyping, CAD Modeling, Laser Cutting, Arduino
As the final project for CS 1951C: Designing Humanity Centered Robots, we recreate the “Butter Robot” from the comic show “Rick and Morty“.
In collaboration with Cíntia Araujo and Jennifer Nino.

Project Statement
Fiction in books and movies has been an important inspiration for many robots in the real world. For the current project, we were curious about the influence of pop culture on people’s expectations of robotics design. In particular, we were wondering how pop culture influences people’s interpretation of robots’ functionality and theory of mind.
To examine people’s perceptions of social robots, we decided to build a “Butter Bot” from the comic show “Rick and Morty”. The butter robot is a small, two-armed, mobile robot which the main character, Rick Sanchez, creates for the sole purpose of passing butter. The major motivation for us to integrate the design of “Butter Bot” was the popularity of the comic and its cultural influence on people’s concept of home robots.
Building Processes
Initial ideas
We first wanted to recreate the robot from the original comic because we were fascinated by the idea of bringing a comic character into real life. After looking into several tutorials, we realized that most of the current designs only contain the appearance of the robot, rather than functionality. While there are some few tutorials recreating its functionality, their appearances are distinct from the original design. Thus, our current project would be the first design that implements both the appearance and the performances of the butter bot.
The first issue we ran into was the idea of movement. How and when would the robot move? For example, would it just move from the location it's currently at, to a target location and then back to its original location? Or would it move to a target location of the object it’s bringing to the location of the requestor? We decided to stick to the first in the spirit of recreating the scene in the episode.

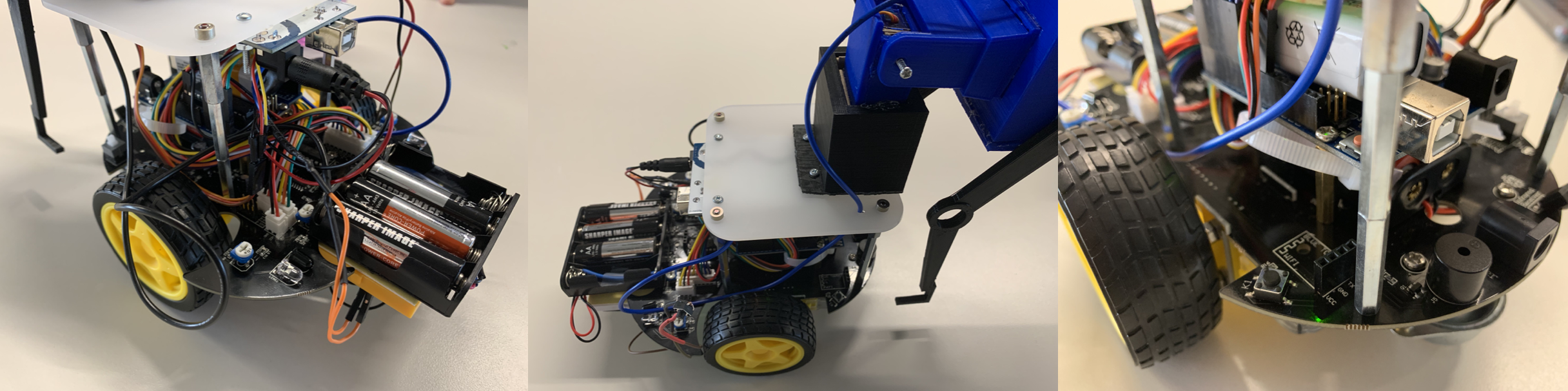
Assembling Parts for the First Iteration

CAD Models for the Parts
Refining
The following issue came up with how we would incorporate the idea of sound. Would we want the robot to speak and if so, say what? Again, in the spirit of keeping it similar to the episode, we decided to give it the same lines as it had in the episode.
Another major issue we ran into was joining all the parts together. Ideally, to save space, we would have connected all of the pieces together. That is the servos, wheels, and sound. After spending too much time trying to connect the servo and wheels to the same Arduino, we realized that was not possible because the servo did not work on pins higher than 11, despite having separate batter sources. Thus, we ended up using two separate Arduino, as well as a soundboard.

Creating the Audio and Laser Cutting Files
Final Iteration
Details for the Final Assemble

A Beautiful Head Shot

The Group (Cíntia Araujo, Jenny Fu, Jennifer Nino) with Our Final Iteration